гғ‘гғғгӮұгғјгӮёгӮӨгғігӮ№гғҲгғјгғ«
гҖҢROS-TCP-Connector v0.7.0гҖҚ
https://github.com/Unity-Technologies/ROS-TCP-Connector.git?path=/com.unity.robotics.ros-tcp-connector#v0.7.0гҖҢURDF-Importer v0.5.2гҖҚ
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer#v0.5.2гӮ’гӮӨгғігӮ№гғҲгғјгғ«
еҸӮиҖғвҶ“
URDFгғўгғҮгғ«гҒ®гӮӨгғігғқгғјгғҲ
еҸӮиҖғвҶ“
AGVControllerиҝҪеҠ
Robotics-Nav2-SLAM-ExampleгӮ’ZIPеҪўејҸгҒ§гғҖгӮҰгғігғӯгғјгғү
https://github.com/Unity-Technologies/Robotics-Nav2-SLAM-Example
и§ЈеҮҚеҫҢгҖҒ
Robotics-Nav2-SLAM-Example-main/Nav2SLAMExampleProject/Assets/Scripts/AGVController.cs
гӮ’AssetsгҒ«гӮігғ”гғј
UnityдёҠгҒ§гҒ®гӮӯгғјгғңгғјгғүгҒ§гҒ®еӢ•дҪңзўәиӘҚ
robotгҒ«гҖҢAGV ControllerгҖҚгӮігғігғқгғјгғҚгғігғҲгӮ’иҝҪеҠ
гҖҢWheel1гҖҚгҒ«гҖҢleft_wheelгҖҚгҖҒгҖҢWheel2гҖҚгҒ«гҖҢright_wheelгҖҚгӮ’зҷ»йҢІ
гҖҢModeгҖҚгӮ’гҖҢkeyboardгҖҚгҒ«иЁӯе®ҡ
гҖҢControllerгҖҚгӮігғігғқгғјгғҚгғігғҲгӮ’з„ЎеҠ№гҒ«гҒҷгӮӢ
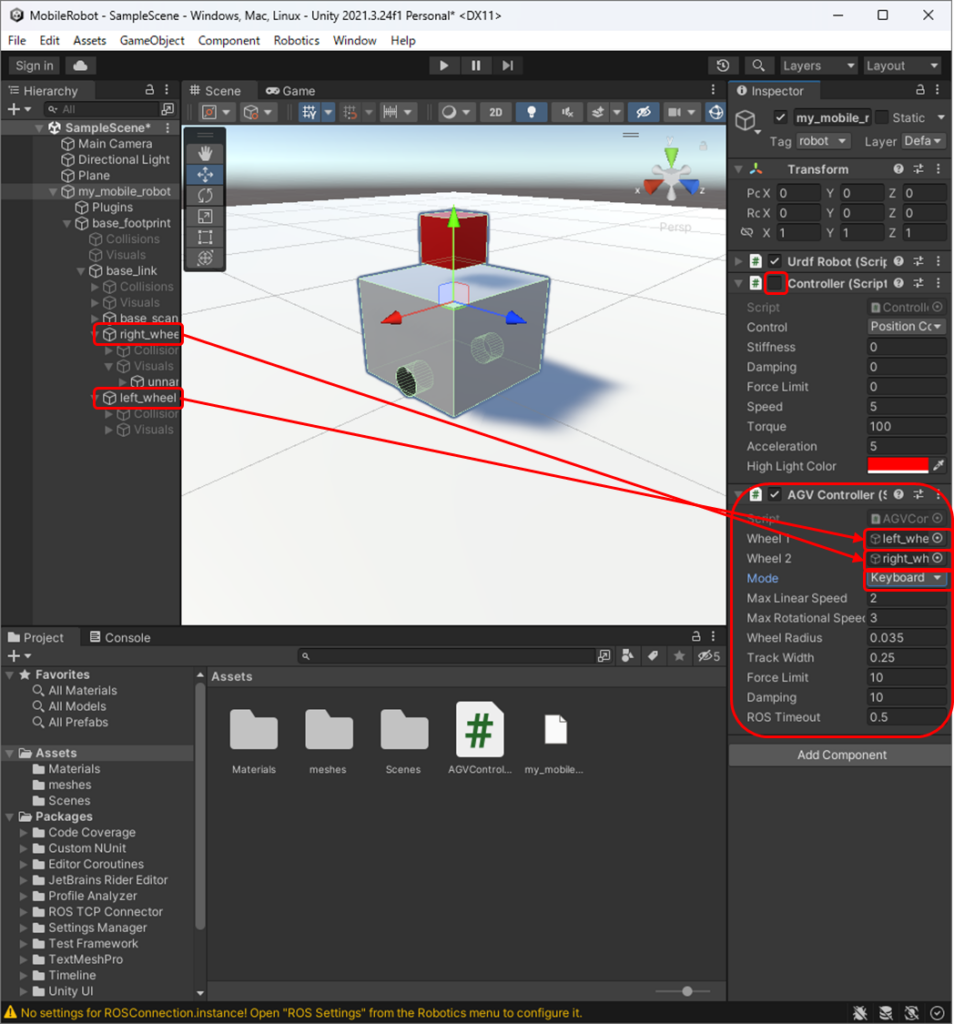
PlayгғңгӮҝгғігӮ’жҠјгҒҷгҒЁгӮ«гғјгӮҪгғ«гӮӯгғјгҒ§гғӯгғңгғғгғҲгҒҢж“ҚдҪңгҒ§гҒҚгӮӢ
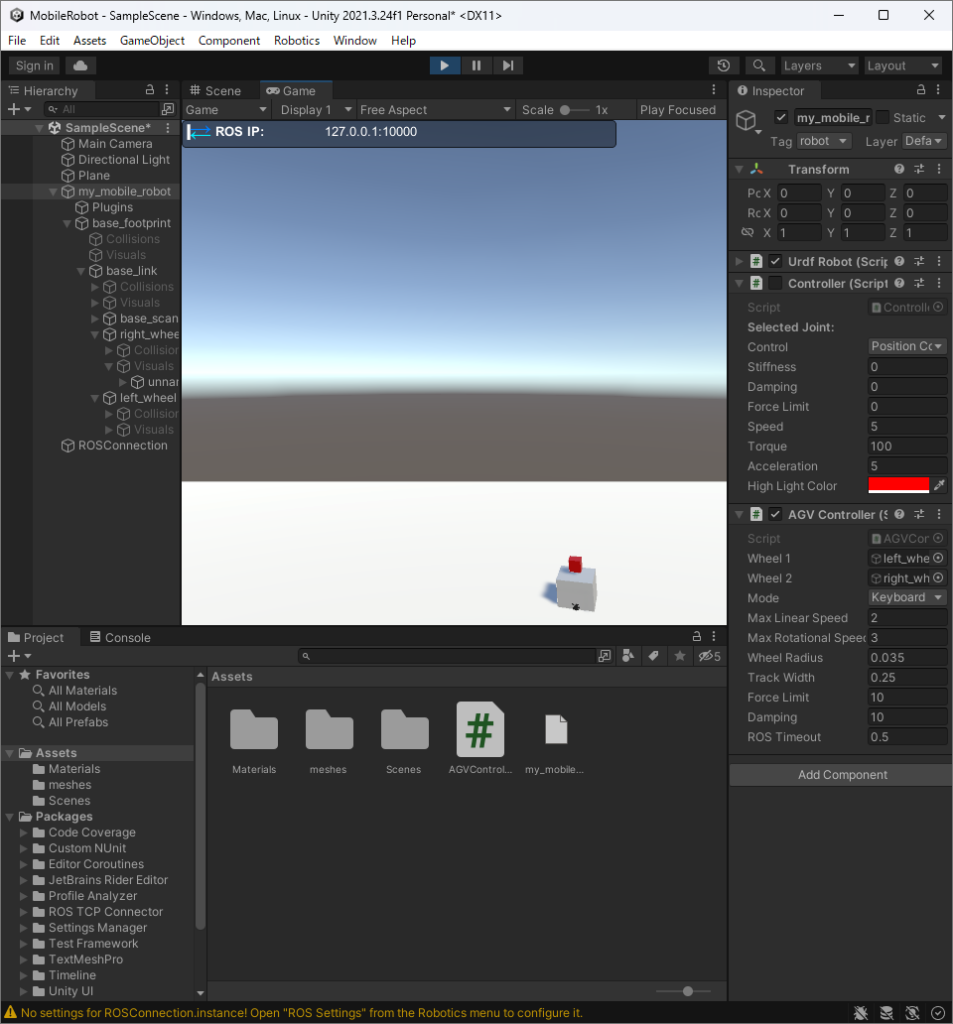
ROSгҒ«гӮҲгӮӢж“ҚдҪң
RORгҒ®жә–еӮҷ
еҸӮиҖғвҶ“
ROSгӮігғһгғігғүгҒ«гӮҲгӮӢж“ҚдҪң
terminal1
roscoreterminal2
rosparam set ROS_IP 0.0.0.0
rosrun ros_tcp_endpoint default_server_endpoint.pyterminal3
rostopic pub /cmd_vel geometry_msgs/Twist -r 2 '{linear: {x: 5.0},angular: {z: 0.0}}'teleop-twist-keyboardгҒ«гӮҲгӮӢж“ҚдҪң
teleop-twist-keyboardгҒ®гӮӨгғігӮ№гғҲгғјгғ«
sudo apt update
sudo apt install ros-noetic-teleop-twist-keyboardteleop-twist-keyboardе®ҹиЎҢ
terminal1
roscoreterminal2
rosparam set ROS_IP 0.0.0.0
rosrun ros_tcp_endpoint default_server_endpoint.pyterminal3
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _repeat_rate:=2
гӮігғЎгғігғҲгӮ’ж®ӢгҒҷ