パッケージインストール
„ÄåURDF-Importer v0.5.2„Äç
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer#v0.5.2をインストール
参考↓
「メニュー」→「Edit」→「Project Settings」
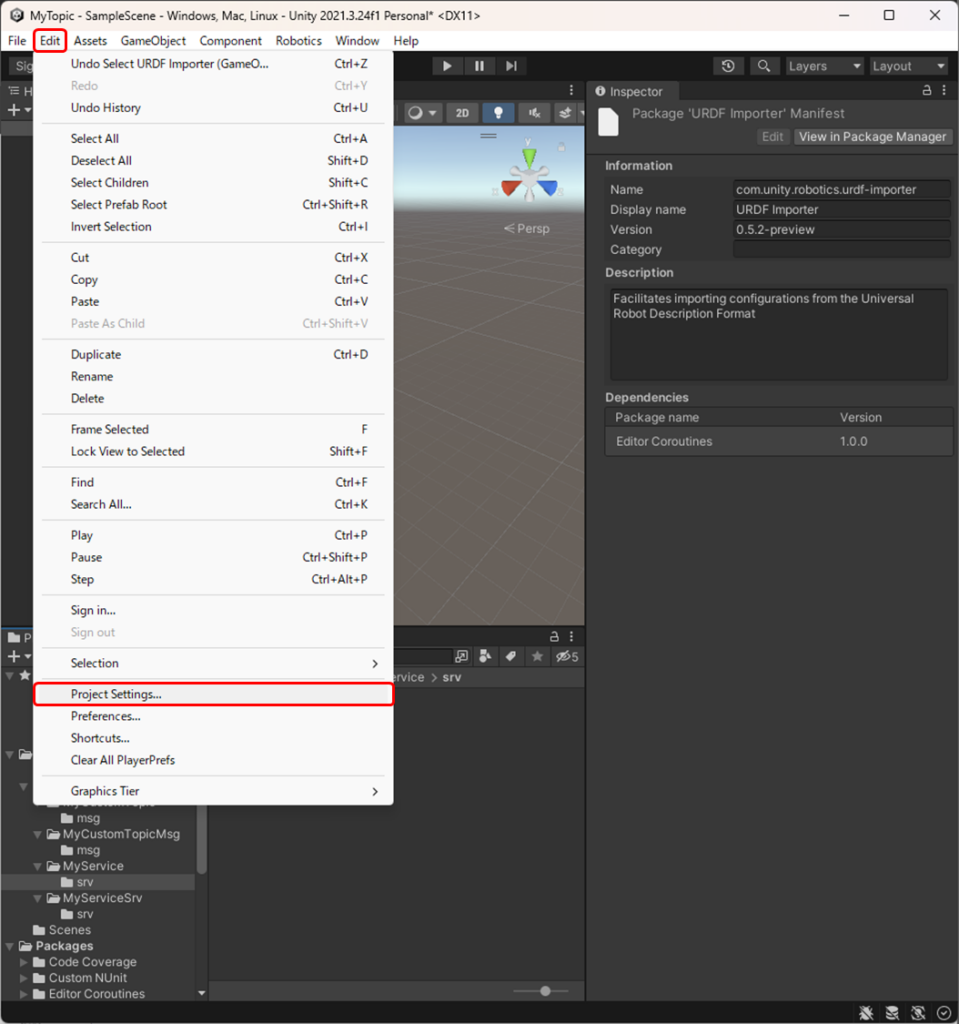
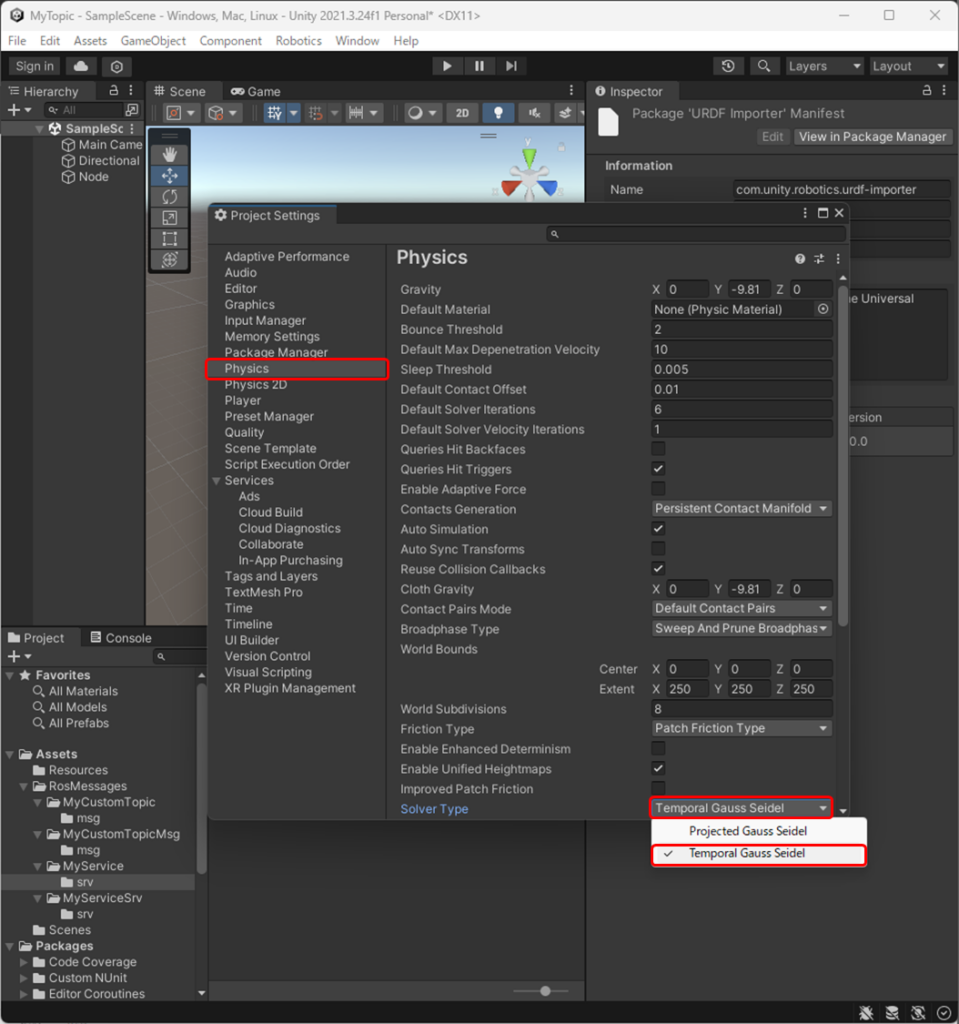
「Physics」→「Solver Type」を「Temporal Gauss Seidel」に設定
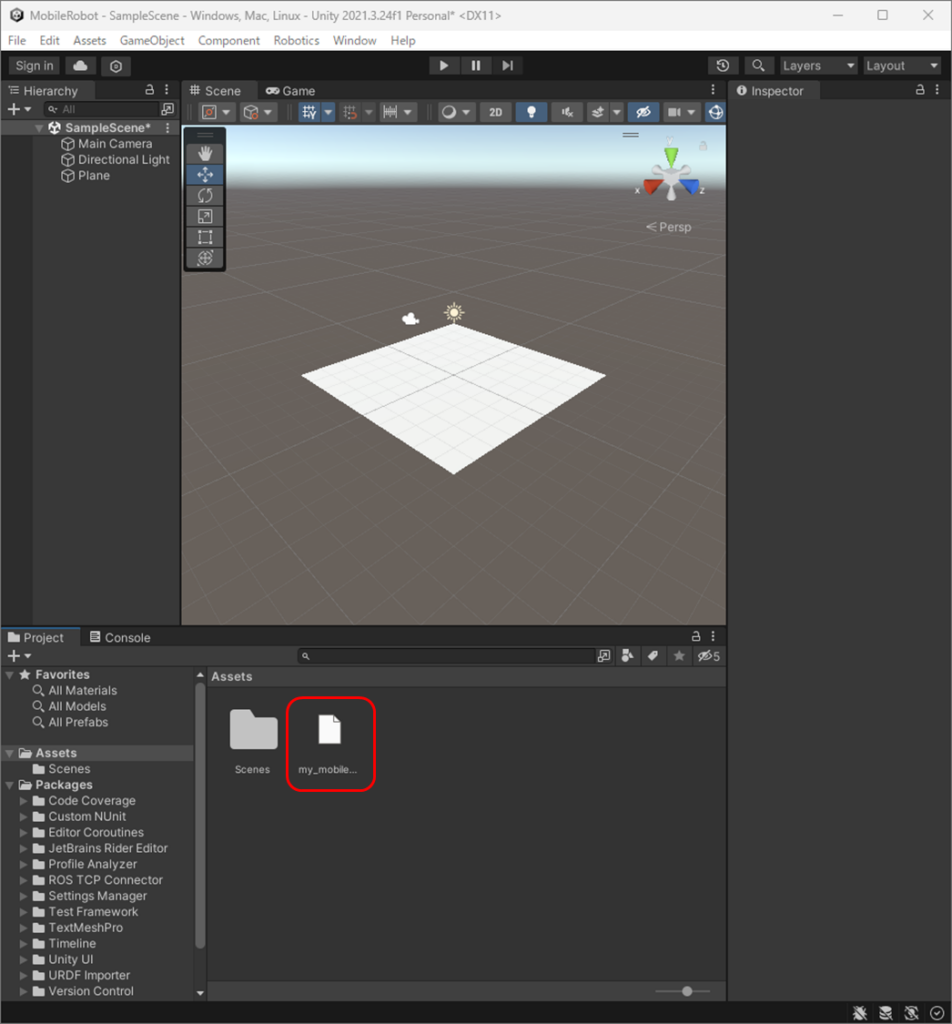
Assetsに.urdfファイルを配置
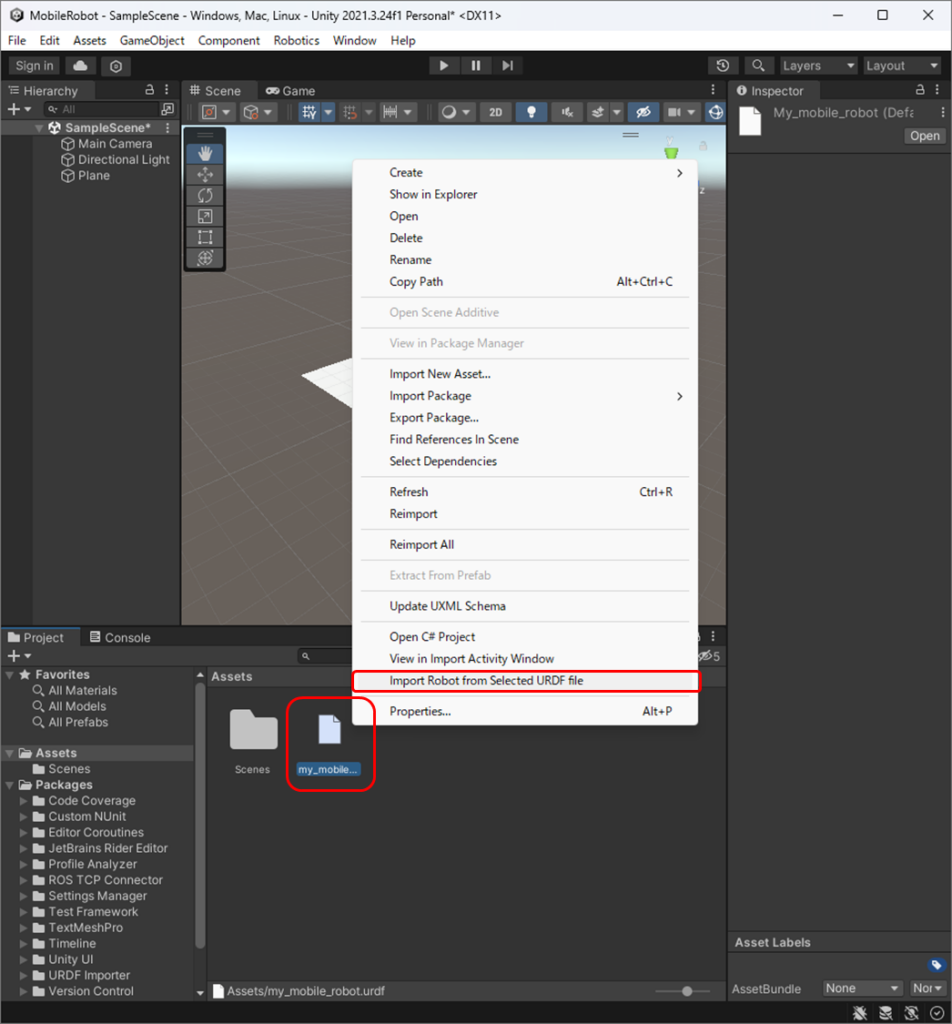
.urdfファイルを右クリックして、「Import Robot from Selected URDF」をクリック
コメントを残す